1:500���y�y�L���g
���ٙ�Ŀ����늼��gՓ�� �l(f��)�����ڣ�2012-10-29 16:25 ��ȣ�
����ժ Ҫ�����ĹP�߽Y��ij���̌���������̽ӑ�˺��y���g����Ҫ�ԣ�����M���н�(j��ng)�����O����ӿ�IJ������M����н��Oˮƽ����(sh��)�ֵ��ΈD����Ҫ���H��������
�����P�I�~: 1��500���y,�y�L,��(sh��)�ֵ؈D
�������̸śr
����ij1:500���y���̜y�^(q��)��(n��i)����������|�σAб������سʼ��Fʽ�ֲ���3�������(zh��n)�����c�ܼ������B��Ƭ������Mխ�����I(y��)�^�����y���(zh��n)�^(q��)��S����I(y��)�^�࣬��������·����܇·�v�M���e����ͨ�l(f��)�_��
����1���Ɯy��
�����y�^(q��)��(n��i)���O��C��D��GPS�����c30��;һ�������c106 �c;�y�^(q��)���Ƽ��ܲ���E��GPS�����M���a�䲼�O��ʩ�y�������OE��GPS�����c969�c��ÿƽ������ƽ��11�c��E��GPS�����c��ʯ��һ�������cҎ(gu��)���M�У�E��GPS�����c���O��rҊ���Dһ��
�������y�^(q��)E��GPS�����c��001E��282E��301E��282E�����̖;�²��OE��GPS�����cȫ�����������c�c֮ӛ��
����1.1 E��GPS�����c��I(y��)�^�y
���������̵�E�������cGPS�y�����Ă��W(w��ng)�M���^�y������߅�c��(li��n)����ʽ����_���W(w��ng)�c�W(w��ng)֮�g�y(t��ng)һ�Ժ͇����ԣ��W(w��ng)�c�W(w��ng)֮�g�M�в����cλ�؏��^�y�����غ�14�c����I(y��)��(sh��)��(j��)�ɼ�ʹ��3�_��Trimble R8 GNSS��9�_��Trimble4600LS��1�_��Trimble R3���ՙC�M���^�y��ÿ��ͬ���h(hu��n)�^�y�ĕr�g������45��犣��l(w��i)�Ǹ߶Ƚ�≥15°����(sh��)��(j��)�ɘ��g����15s���r������һ�l(w��i)����Ч�^�y�r�g≥15min,��Ч�l(w��i)�ǿ���(sh��)≥4��PDOP≤6��
����1.2 E��GPS�����cƽ��Ӌ��
���������A̎�������������W(w��ng)����Trimble��˾��Trimble Geomatis Offieܛ���M�У����л���̎���ꮅ���ѿ��û���ݔ�����m��CosaGPSܛ���Ĕ�(sh��)��(j��)��ʽ;���������W(w��ng)ƽ�������h��W�y�L�c���g�WԺ�_�l(f��)��CosaGPSܛ���M��ƽ�ͬ���h(hu��n)���ϡ�GPS�y��Ҏ(gu��)��������Ҫ���\��CosaGPSܛ���M��ƽ����{(di��o)�������(sh��)��(j��)���M�����S�s��ƽ�Ȼ���M�ж��S�s��ƽ�
����1.3 E��GPS�����cƽ�����r
����1.3.1ԓƬ�^(q��)A�˶�1:500���y��(sh��)�ֻ��y�L����E��GPS���ƾW(w��ng)һ
�����M��50��ͬ���h(hu��n)���h(hu��n)�]�ϲ����8.391ppm����С0.259ppm����±10ppm;
�����M��36�������h(hu��n)���h(hu��n)�]�ϲ����9.683ppm����С0.650ppm����±10ppm��
�������ƾW(w��ng)�����S�s��ƽ��ľ��ȣ�
���������c�cλ�`��: 0.98 cm [838E]
��������߅�����`� 1/46000 [336E –337E]
�������ƾW(w��ng)�Ķ��S�s��ƽ��ľ��ȣ�
���������c�cλ�`��: 0.32cm [838E]
��������߅�����`� 1/50000 [336E –337E]
����1.3.2ԓƬ�^(q��)A�˶�1:500���y��(sh��)�ֻ��y�L����E��GPS���ƾW(w��ng)��
�����M��83��ͬ���h(hu��n)���h(hu��n)�]�ϲ����9.898ppm����С0.282ppm����±10ppm��
�����M��33�������h(hu��n)���h(hu��n)�]�ϲ����9.927ppm����С1.507ppm����±10ppm��
�������ƾW(w��ng)�����S�s��ƽ��ľ��ȣ�
���������c�cλ�`��: 1.52 cm [192E]
��������߅�����`� 1/34000 [028E – 027E]
�������ƾW(w��ng)�Ķ��S�s��ƽ��ľ��ȣ�
���������c�cλ�`��: 1.16cm [027E]
��������߅�����`� 1/22000 [028E – 027E]
�������ƾW(w��ng)֮�g�cλ�؏��^�y���ɴ��^�yƽ��Ӌ������˲�ֵ����023E����X��ֵ��0.024m, ��Y��ֵ��0.004m;��ظ߲�ֵ����695E����ֵ��0.039m�����ȷ���Ҏ(gu��)�����OӋҪ���غ��cȡ�ɽM��(sh��)��(j��)�Д�(sh��)������K�ɹ���
����2��y��
�������y�L��������c���O���Å^(q��)��W(w��ng)���c�����Ⲽ�c2�N�����������O����c645�c��
����2.1�^(q��)��W(w��ng)���c
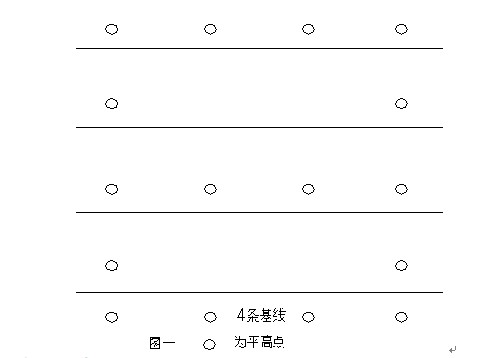
�����^(q��)��W(w��ng)���c�ĺ��������Ȟ�4�l�����������Ȟ�2�l����(��Dһ)���ڻ���֮�g��δ�Ӳ�ƽ���c����Ҏ(gu��)�t�^(q��)��W(w��ng)���c���ڰ��ս�̎�Ӳ�ƽ���c��
����2.2 ����c��̖
��������������c��F001-F329��F351-F502�����̖���a�c����c��BF01-BF08��FF300-FF391�����̖��
����2.3��Ƭ�����
�����y�^(q��)ע����Ƭ�����Ϸ����룬�ڜy�^(q��)���Q�·�ע����̖����Ƭ̖������̖�Ա����ϰ����y(t��ng)һ��̖����Ƭ̖ȡ���z�r��̖(�ú�4λ��(sh��)��)��
������Ƭ�����������c��ֱ����7mm�ļtɫ�AȦ����c̖(�c��)�߳�עӛ�ütɫ�Է�ʽעӛ�����Ӟ��c̖����ĸ��̡߳��߳�עӛ���cĿ�˾��w��λ�ĸ̡߳���Ƭ�ķ����������������̖�˳��cλ���c̖���_���f�����cλ�ã��L���ԈD���cλ�ԈD���f�����̿�����һ�£����c�ߡ��z���߾�������ע���ڡ������g���õ�����cȫ�����������Ļ���Ƭ���D(zhu��n)�ˣ�ע���c̖���f�����cƬ̖��
����2.4����c�y�����I(y��)����
�����^(q��)��һ���㔵(sh��)��(j��)�������c025C��029C��098D��301E��090D��035C��111D��123D��125D��A734����RTK�y����У���c��
�����^(q��)������㔵(sh��)��(j��)�������c040C��127D��130D��A654��123D��125D��A734����RTK�y����У���c��
������I(y��)�������_��Trimble R8 GPS���ՙC��
��������GPS-RTKģʽ�y���r���O�Ļ���վ�У�0060��029C��098D��105D��123D��040C��127D��A717��100D��025C��A639��
����2.5������r
�����^(q��)��һ���Ƚy(t��ng)Ӌ������(j��)����RTK�y����У���c�ó���ˮƽ�������飺0.019m����С��0.000m;��ֱ�������飺0.032m����С��0.001m;
�����^(q��)������Ƚy(t��ng)Ӌ������(j��)����RTK�y����У���c�ó���ˮƽ�������飺0.025m����С��0.004m;��ֱ�������飺0.025m����С��0.003m��
����3����������
���������̲����Ї��y�L�ƌWԺ�аl(f��)Geolord-AT�Ԅӿ���ܛ����ƽ�_�M�����a(ch��n)������ܳɹ�ֱ���D(zhu��n)��VirtuoZo��JX4Cȫ��(sh��)�֜y�Dϵ�y(t��ng)�B���{(di��o)�ã����F(xi��n)�������ܳɹ��c��(sh��)�ֻ��y�D�����g�o�p��܉��
����3.1���ܷօ^(q��)
����������I(y��)��ؾW(w��ng)���O�������M�Ѓ�(n��i)�I(y��)�������ܷօ^(q��)�����y�^(q��)���ú���������ƽ�������11���^(q��)��
����3.2�����c�x�c
���������̼����c�x�c�����·����M�����I(y��)��
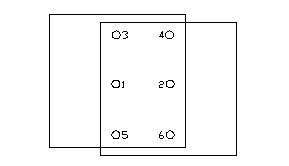
����(1)��������Ҫ���B���cλ���x����D��ʾ��1��2��3��4��5��6�����˜��cλ�����������˜��cλ���x�cĿ�˲��m�ϣ������B���c�Ĕ�(sh��)��������B�ӏ��ȡ�
����(2)���cλ���x��Ƭ���־������1mm��
����(3)���օ^(q��)���ּ����c�x�����g�յص����@�c�ϡ�
����(4)�����������ܞ����ɈD߅�����ּ����c�x�ڈD�����⡣
����3.2�������W(w��ng)��ƽ��
����ȫ��(sh��)�ֿ������ǜy������GeoLord-AT�M�п������ܺ�ƽ����㡣
����3.3�������I(y��)���̣�
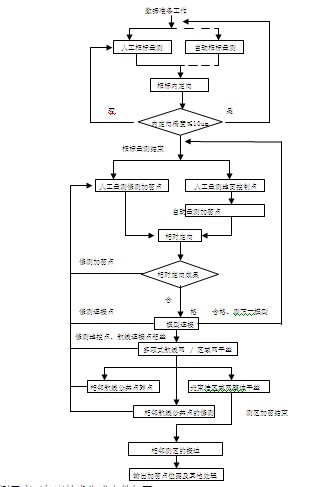
�����y�^(q��)�������ܼ��g�����ļ����£�
���������˃�(n��i)����(*.outkb)→�x����ƴ���c��ģ���B���c→��ģ���c��������(*.outs)→���������wƽ��(*.outp)→�����ֲ��{(di��o)���������^(q��)����������wƽ��(*.outb)→���܅^(q��)��W(w��ng)�g�����c��߅(*.outc) →ݔ��ԓ�^(q��)���ܳɹ�(*.jmb *.shp *.dmc *.sel)��
��������(sh��)�O�ã�����ݔ��y�^(q��)��Ϣ����C��Ϣ�ļ�������c�ļ���
����3.4�������ܾ���
���������̿������ǜy�����ܵ����п����c�ľ��ȝM������Ҫ��
������UCX�ǔ�(sh��)��Ӱ����Ҫ��(n��i)����;
��������������ƽ�ء�����ؘ˜��c�Ϛ�������ҕ��С��0.015mm���z���c�Ϛ�������ҕ��С��0.02mm��
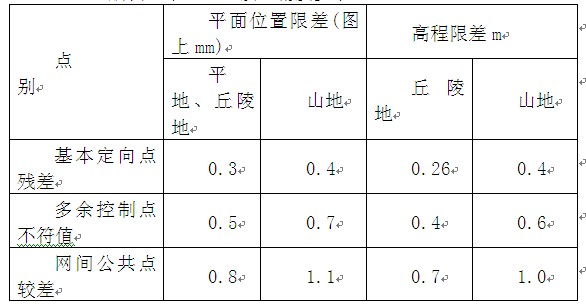
�����ۼ����c���`��ͽ^��(���)������������c�����������c�IJ���ֵ���^(q��)��W(w��ng)�g�����c���^���С���±�Ҏ(gu��)��(��Ҋ����һ)��
����1:500���y��ƽ�ء�����ؾ���Ҫ��
�����܃�(n��i)�����������^����������Ԅӿ������ǜy������ɣ��ں��m(x��)ȫ��(sh��)�֜y�D�в����M�С�
��������������ȫ��(sh��)�֔zӰ�y��ϵ�y(t��ng)ͨ�^ƥ���Ԅ�����������o������Y�������څ��c������c��(sh��)�^�࣬�h�������`���^����c���cλ�^�ٵą^(q��)���M���˹����c��ƥ�侎��
���������еĸߵȼ��cȫ���������e�`�IJ���ԭ���J��̎����̎����Ҋӛ�ڶ����ֱ��С�ƽ���̴߳���2�����`����c��ҕ��ֲ��������������I(y��)�����c��������ӛ䛣����Ŀؓ؟�˅f(xi��)ͬ��Q��
�����ߴ_���^(q��)������ɺ˾�Ӱ�����I(y��)�^(q��)��Ĵ_�����������c�B������ȫ��(sh��)�֔zӰ�y��ܛ����ͨ�^�^��ģ��ƴ�ӽY���_�����I(y��)�^(q��)��
����3.5�����u�r
��������(j��)�����zӰ��r�����֜y�^(q��)���ܡ����^(q��)������^��Ӌ���`�ҊӋ��ɹ�outkb��outs��outp��outb���`����Ϣ�ļ������^(q��)��ƽ��Y������ָ�˽y(t��ng)ӋҊ����һ��
����4����(n��i)�I(y��)��(sh��)��(j��)�ɼ�����I(y��)�{(di��o)�L�c�a�y
�������y��(n��i)�I(y��)����ȫ��(sh��)�֔zӰ�y������վVirtuoZoϵ�y(t��ng)��JX4ϵ�y(t��ng)�M�Д�(sh��)��(j��)�ɼ������Ì��T���L�Dܛ��cass7.1�M�Д�(sh��)��(j��)����
����4.1����(sh��)��(j��)�ɼ���ԭ�t�������ȃ�(n��i)�I(y��)����I(y��)�����I(y��)��������(n��i)�I(y��)�����wģ�Ͷ�λ����I(y��)���ض���;
����4.2����(sh��)��(j��)�ɼ��ă�(n��i)��:��(sh��)��(j��)�ɼ��ă�(n��i)����Ҫ���ߴ��������غ�ԫ�š����V�����������Oʩ����·�������Oʩ���ܾ��������Oʩ��ˮϵ�������Oʩ����ò��ֲ����
����5���YՓ
�����S���F(xi��n)���Ƽ��İl(f��)չ��1��500���y��(sh��)�ֻ��y�L���g�Č����������ƣ�ʹ��ɹ����ɈD���ȝM��1:500���y��(sh��)�ֻ�����Ҫ��.�M����н��Oˮƽ����(sh��)�ֵ��ΈD����Ҫ��
�����}��1:500���y�y�L���g
�D(zhu��n)�dՈע�����ԣ�http://www.anghan.cn/fblw/dianxin/guangdian/13650.html
���P���}���
�zӰˇ�g�I��AHCI�ڿ����]��Phot...�Pע:106
Nature���¶��W���ӿ�Nature Com...�Pע:152
��С�W�̎�ֵ���˽⣬�@Щ�����W...�Pע:47
2025�ꌑ����WՓ�Ŀ����õ�19��...�Pע:192
�y�L�I��Ƽ������ڿ��x�� �p����...�Pע:64
���r�_Փ�ęz���C������Ҫ�Pע:52
�Ї�ˮ�a(ch��n)�ƌW�ڿ��Ǻ����ڿ����Pע:54
���H������Ҫ�˽�Ć��}����Pע:58
���������ܷ��u�Q���Pע:48
��ŌW����Щ��Ͷ���SCI�ڿ���ֵ...�Pע:66
ͨ�Ź����ИI(y��)Փ���x�}�Pע:73
SCIE��ESCI��SSCI��AHCI�ڿ�Ŀ�...�Pע:121
�u�Q�l(f��)Փ�ĺ�߀�dz������Pע:68
��ӡ���Y����Ҫ�D(zhu��n)�d��Դ�ڿ���...�Pע:51
�����ϢՓ�ķ���
���ܿƌW���gՓ�� �V���ҕՓ�� ��늼��gՓ�� Ӌ��C��Ϣ����Փ�� Ӌ��C�W(w��ng)�jՓ�� Ӌ��C����Փ�� ͨ��Փ�� ��Ϣ��ȫՓ�� ��ӑ���Փ�� ��Ӽ��gՓ�� �����t(y��)�W����Փ�� ܛ���_�l(f��)Փ��

SCI�ڿ�����
- MEASUREMENT SCIENCE and TECHNOLOGY�п�Ժ�օ^(q��)
- MEAT SCIENCE�ڿ������п�Ժ�օ^(q��)
- MECCANICA�п�Ժ�ׅ^(q��)
- MECHANICAL ENGINEERING�п�Ժ�օ^(q��)
- MECHANICAL SYSTEMS AND SIGNAL PROCESSING�ڿ������п�Ժ�օ^(q��)
- MECHANICS OF MATERIALS�ڿ������п�Ժ�օ^(q��)
- Mechanics of Solids�п�Ժ�օ^(q��)
- MECHANICS OF TIME-DEPENDENT MATERIALS�ڿ������п�Ժ�օ^(q��)
- MECHANISM AND MACHINE THEORY�п�Ժ�ׅ^(q��)
- MECHATRONICS�s־���п�Ժ�ׅ^(q��)