��ʽ���ؙC(j��)RCS�C(j��)��(g��u)�ļ��g(sh��)�����c��(y��ng)��̽ӑ
���ٙ�Ŀ���C(j��)еՓ�� �l(f��)�����ڣ�2011-07-26 07:54 ��ȣ�
����ժҪ���p늙C(j��)RCS�����C(j��)��(g��u)�Ǵ��������C(j��)��(y��ng)����V����һ�N�����C(j��)��(g��u)�����Č�(du��)늿ؽM�ɡ�늙C(j��)�x�͡��{(di��o)�ٷ�ʽ��ܛ�����̵ȷ����M(j��n)�м��g(sh��)���죬��ʹ���^(gu��)����ȡ�����{(di��o)�ٷ����V���ɿ��Ըߡ������ʵ͵ĵ��@��Ч����
�����P(gu��n)�I�~����ʽ���ؙC(j��)��RCS�����C(j��)��(g��u)�����g(sh��)���죻��(y��ng)��
�����������(l��i),��ʽ���ؙC(j��)���齨���C(j��)е��һ��(g��)��Ҫ�C(j��)�N,�o(w��)Փ��Ʒ�N��Ҏ(gu��)����̖(h��o)�����ܺ��|(zh��)����,���кܴ�İl(f��)չ��20���o(j��)80������ڣ��ɷ���(gu��)��̹��˾���M(j��n)���C(j��)�����a(ch��n)���g(sh��)�����������҇�(gu��)���C(j��)���a(ch��n)���g(sh��)��ˮƽ���p늙C(j��)RCS�����C(j��)��(g��u)��Ŀǰ�҇�(gu��)���������C(j��)��(y��ng)�ÏV����һ�N�����C(j��)��(g��u)�����Y(ji��)20���ʹ�ý�(j��ng)�(y��n)���Y(ji��)���҇�(gu��)���I(y��)�İl(f��)չˮƽ���ڇ�(gu��)�a(ch��n)���Ļ��A(ch��)�ϣ���(du��)ԓ�C(j��)��(g��u)�M(j��n)�м��g(sh��)���죬��Ȼ��(hu��)���ԓ�C(j��)��(g��u)�Ŀɿ��ԣ��������ʣ��U(ku��)��ԓ�C(j��)��(g��u)�đ�(y��ng)�÷�����
����һ����ԭ��
����RCS�����C(j��)��(g��u)���Ƀ��_(t��i)��ȫ��ͬ���Ƅ�(d��ng)�����@���D(zhu��n)��늄�(d��ng)�C(j��)��һ�_(t��i)�Q(ch��ng)�����12늄�(d��ng)�C(j��)��һ�_(t��i)�Q(ch��ng)�����32늄�(d��ng)�C(j��)��ͨ�^(gu��)�ٱ�1:2���X݆���c�p�ٙC(j��)���B�������r(sh��)��ͨ�^(gu��)һ�_(t��i)�τ�(d��ng)늙C(j��)�p���D(zhu��n)��������裬�����D(zhu��n)�����������늄�(d��ng)���أ���(l��i)��(sh��)�F(xi��n)���ٵ�Ŀ�ģ���һ�_(t��i)���τ�(d��ng)늙C(j��)�ͳɞ�һ�_(t��i)�����l(f��)늙C(j��)�����D(zhu��n)�������(j��ng)���������䶨���ϣ����γ�һ��(g��)늚�p�پ���������׃�Ƅ�(d��ng)���ؾͿ����M(j��n)���{(di��o)�١���RCS�����C(j��)��(g��u)�����c(di��n)��늙C(j��)�ڲ�ͬ�·�о��ж�N���ܣ�(1)늄�(d��ng)�C(j��)�τ�(d��ng)���ܣ�(2)�l(f��)늙C(j��)���ܣ�(3)늚�p�پ��������ܣ�(4)�C(j��)е�Ƅ�(d��ng)�����ܡ�
�������_(t��i)��ȫ��ͬ�Ď��C(j��)е�Ƅ�(d��ng)�����@���D(zhu��n)��늄�(d��ng)�C(j��)���γ�һ��(g��)��Ƽs���]�h(hu��n)���ơ�λ��ؓ(f��)�d�½��r(sh��)����ȫ������ʧ�ن�(w��n)�}�����_(t��i)�@��늄�(d��ng)�C(j��)��ȫ��ͬ�����������ܹ���һ��(g��)�������늿ط֞�5��(g��)�ٶȣ����τ�(d��ng)ؓ(f��)�d�\(y��n)��(d��ng)���{(di��o)�٣���Փ���������½����ٶ���Σ�����������ٶ��\(y��n)�У����d���Ԝ�(zh��n)�_��ȫ��λ������ƽ��(w��n)������{(di��o)�ٷ�����1:40���Ķ�������a(ch��n)Ч�ʡ�
���������g(sh��)����
����ԓ�C(j��)��(g��u)���ܺã������ڲ���ʹ�ò���(d��ng)���������Еr(sh��)ƫ�ߡ��҂�����늿�ϵ�y(t��ng)��늙C(j��)�x�͡��{(di��o)�����ԡ����ٷ�ʽ�ȷ����M(j��n)�м��g(sh��)���죬��ߙC(j��)��(g��u)��(y��ng)�õĿɿ��ԡ�
����1��늿�ϵ�y(t��ng)
����RCS�����C(j��)��(g��u)�ăɂ�(g��)늙C(j��)����һ��(g��)����䣬���^���5���|���M(j��n)�п��ƣ��ɿ��Եͣ������ʸߡ�ԭ늿�����乲��12��(g��)���g�^�����5��(g��)�ӕr(sh��)�^�����13��(g��)���|���������x�ͺ͐��ӵĹ����l����2��(g��)�����ӕr(sh��)�^�����2��(g��)�p���ӕr(sh��)�^�������(hu��)ʹϵ�y(t��ng)��������������
�������C(j��)˾�C(j��)���`������ɹ�����ƫ�ߡ���M���p���`����������(j��)��(du��)RCS�����C(j��)��(g��u)�����^(gu��)�̵ķ������҂��ÿɾ���������������^�������(du��)RCS�����C(j��)��(g��u)�M(j��n)����ȫ�µ�늿��O(sh��)Ӌ(j��)���҂��x�õ�С�����wʽ�ɾ������������(n��i)������̎���ٶȿ죬���S���ĸ��N����Ԫ����������×l�����ơ�ָ����ơ����r(sh��)����B(t��i)�ȹ��ܣ�����ԭ�����е��^������ӕr(sh��)�����M��ÿ��(g��)��(d��ng)���^(gu��)�ɵ�Ҫ��(sh��)�F(xi��n)���(f��)�s���{(di��o)�ٹ��ܡ��˷��{(di��o)���^(gu��)�̵ě_�������ϵ�y(t��ng)�Ŀɿ��ԣ����͙C(j��)���Ĺ����ʡ�
����2.늙C(j��)
����RCS�����C(j��)��(g��u)ʹ�Ãɂ�(g��)��ͬ��늙C(j��)��Ŀǰ��(gu��)��(n��i)һ���x��51.5KW늙C(j��)����������(sh��)Ҋ(ji��n)��1��
������1YTSR180M2-4늙C(j��)����(sh��)��

����ԓ늙C(j��)�����M(j��n)����(gu��)���g(sh��)��(gu��)��(n��i)���a(ch��n)�ģ�������D(zhu��n)�ر���(sh��)���_(d��)3.2�����ϡ�늙C(j��)����D(zhu��n)��Mm=3.2Mz=1091Nm��
����RCS�����C(j��)��(g��u)����(d��ng)�{(di��o)�ٕr(sh��)���(q��)��(d��ng)늄�(d��ng)�C(j��)�D(zhu��n)�Ӵ�����3����裬�γ�3�l�˞�C(j��)е�������������ГQ�D(zhu��n)��M2=1.2MZ���ГQ�c(di��n)������(j��)Ӌ(j��)���L���C(j��)е���ԣ�Ҋ(ji��n)�D1���D��s��늙C(j��)�D(zhu��n)���ʣ�M2��늙C(j��)�D(zhu��n)�أ�M2늙C(j��)�~���D(zhu��n)�أ�ne늙C(j��)�~���D(zhu��n)�٣�Mm늙C(j��)����D(zhu��n)�ء�

�����D1ԭ�O(sh��)Ӌ(j��)�C(j��)е����
�����ĈD�п��Կ�����RCS�����C(j��)��(g��u)늙C(j��)�D(zhu��n)�����г���1�κ͵�2�����r(sh��)��������D(zhu��n)��ֵ�քe��2.05��2.76�����~���D(zhu��n)�أ��ѽ�(j��ng)�ܴ��ˡ����г���3�Εr(sh��)�����ГQ�D(zhu��n)��ֵ�_(d��)����늙C(j��)������D(zhu��n)��ֵ����3.2�����~���D(zhu��n)�أ���˴���D(zhu��n)�؎���(l��i)�ě_����늙C(j��)�����|���������C(j��)��(g��u)������ƫ�ߵ���Ҫԭ��֮һ���Ķ���ʹ����r����늙C(j��)�x��ƫ����Ʉ�(d��ng)�B(t��i)�_���^(gu��)������ƫ�ߣ���Ҫ�M(j��n)�м��g(sh��)���졣�҂��J(r��n)���x��41KW늙C(j��)��ȫ�܉�M�㹤�،�(sh��)�Hʹ�õ���Ҫ����������(sh��)Ҋ(ji��n)��2��
������2YTSR180M1-4늙C(j��)��������(sh��)

����늙C(j��)������D(zhu��n)�،��p��221Nm�����p���ˌ�(du��)늙C(j��)�͙C(j��)е�ě_�����ڴ˻��A(ch��)�ϣ������?g��u)��{(di��o)���������M(j��n)�м��g(sh��)���죬�_���D(zhu��n)�ؾ͕�(hu��)�p�ٸ��࣬��Ȼ����늚��c�C(j��)е�O(sh��)��Ĺ����ʡ�
����3���{(di��o)������
������1��ԭ늙C(j��)�C(j��)е���Է���
�����ĈD1�п��Կ����(q��)��(d��ng)늙C(j��)�{(di��o)�ٵĄ�(d��ng)�B(t��i)�^(gu��)�̣�ԭ���֞�3�Σ��ұ�ֵ������������{(di��o)���^(gu��)���еě_����
�������D(zhu��n)���ɴ���3������ГQ������2�����r(sh��)������D(zhu��n)��M1=2.05Mz���D(zhu��n)��׃��������M1-M2����0.85�����~���D(zhu��n)��Mz��
�������ɴ���4������ГQ������1�����r(sh��)������D(zhu��n)��M1=2.76Mz���D(zhu��n)��׃����M1-M2��������1.56�����~���D(zhu��n)��Mz��
�����ۮ�(d��ng)�D(zhu��n)���г����1�����r(sh��)������D(zhu��n)��M1Ҫ�_(d��)��늙C(j��)������D(zhu��n)��ֵ��3.2�����~���D(zhu��n)��MZ����
������2�����M(j��n)�O(sh��)Ӌ(j��)��C(j��)е���Է���
��������RCS�����C(j��)��(g��u)�ľ��w��r��늙C(j��)�D(zhu��n)����������ɷ�3�θĞ��4���M(j��n)���ГQ��������ֵ�M(j��n)���{(di��o)������r�͕�(hu��)��һ�ӡ�����(j��)Ӌ(j��)�����D(zhu��n)���ʵ�����(du��)��ֵ��1:2���҂���M2=1.2MZ��r�L�����˞�C(j��)е����������Ҋ(ji��n)�D2��
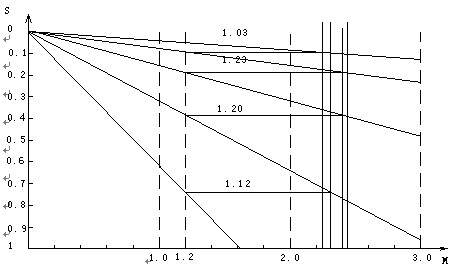
�����D2M2=1.2MZ�r(sh��)�ęC(j��)е����
�����ĈD2���Կ�����(d��ng)M2=1.2MZ�r(sh��)���D(zhu��n)���ڷքe�̽�4�����r(sh��)���D(zhu��n)��׃���ʣ�M1-M2��
����ֻ�У�1.12MZ��1.20M��1.23MZ��1.03MZ�����ГQ���r(sh��)������D(zhu��n)�أ���M1��Ҳֻ��2.43MZ��
����ͨ�^(gu��)���Ϸ������������@�ؿ������D(zhu��n)���ɴ�3�θĞ鴮4���M(j��n)���ГQ���ГQ�D(zhu��n)��M2ԽС�t�D(zhu��n)��(d��ng)�B(t��i)׃��������ԽС������D(zhu��n)��Ҳ��(hu��)׃С�����˻�����������á���(d��ng)�ГQ�D(zhu��n)��M2=1.2MZ�r(sh��)���ГQ������D(zhu��n)��M1Ҳֻ��2.43MZ���@����ȫ�܉�M������(d��ng)���{(di��o)�ٕr(sh��)ƽ��(w��n)�^(gu��)�ɵĹ���Ҫ��ġ�ͨ�^(gu��)늙C(j��)�x�ͺ��{(di��o)�ٷ�ʽ�������O(sh��)Ӌ(j��)��ϵ�y(t��ng)��������D(zhu��n)����1091Nm,���͵�661Nm���_�����@�pС��
����4���{(di��o)�ٷ�ʽ
�������^���—���|���M�ɵ�늿�ϵ�y(t��ng)������1��2��3���r(sh��)��PV늙C(j��)��������ã�GV늙C(j��)��p�����á���4���r(sh��)��GV늙C(j��)���г���PV늄�(d��ng)�C(j��)�D(zhu��n)�������ӕr(sh��)���2����裬Ȼ����PV늄�(d��ng)�C(j��)���~���D(zhu��n)���\(y��n)�С���5���r(sh��)��PV늙C(j��)���г���GV늄�(d��ng)�C(j��)���D(zhu��n)�Ӵ�2��������r�½����·��Ȼ��GV늄�(d��ng)�C(j��)�D(zhu��n)����ͬ�ӷ�ʽ�����ӕr(sh��)���2����裬��GV늄�(d��ng)�C(j��)���~���D(zhu��n)���\(y��n)�С�4��5���ɂ�(g��)늙C(j��)�g���ГQ����˲���Ҫ�ě_����
������˷��{(di��o)����늙C(j��)�ГQ�ě_��(w��n)�}���҂����ÿɾ������������(du��)ԭ늿��M(j��n)�м��g(sh��)���죬�ЃɷN�{(di��o)�ٷ�ʽ�ɹ��x��һ�N�DZ���ԭ���ٷ�ʽ���ɲ���5����Ч�ʵͣ�����һ�N�Ǹ���(j��)�d�ɲ�ͬ�x��늙C(j��)ֱ���(q��)��(d��ng)������늙C(j��)���ГQ����(d��ng)�d��ϵ��(sh��)0.5≤G≤1�r(sh��)���H�ɵ���늙C(j��)�(q��)��(d��ng)����(d��ng)�d��ϵ��(sh��)G≤0.5�r(sh��)���H�ɸ���늙C(j��)�(q��)��(d��ng)��������ԭ��(l��i)��늙C(j��)�ГQ���p���˲���Ҫ�ě_����
������ܛ������
�����Կɾ��������������߉���Ƶĺ���Ԫ�����܉���ܛ������Ӳ�����ɿ��Ըߡ����ɔ_������(qi��ng)���҂��������c�·š������c�p�ٸ����֞鲻ͬ�Ġ�B(t��i)����(sh��)�F(xi��n)��늄�(d��ng)�c�Ƅ�(d��ng)�C(j��)е������ƌW(xu��)�����ĽM�Ͽ��ơ���˿���ϵ�y(t��ng)���ܺã������ʎ����㡣
�����ɾ������������ܛ���ǿ��Ƶĺ��ġ���ܛ�������У��҂���ֿ��]RCS�����C(j��)��(g��u)�������^(gu��)���cʹ��Ҫ��İ�ȫ�l��������������������Q�K������r�����O(sh��)Ӌ(j��)��������B(t��i)���̈D����늙C(j��)�ڲ�ͬ��B(t��i)�¸���(g��)��ͬ�ęC(j��)е�����{(di��o)��Ҫ���ÿɾ�����������Ġ�B(t��i)���M(j��n)�нM�ϡ������ΈD��ʽ�O(sh��)Ӌ(j��)��������ø��N����Ԫ����ɼ����c�p�ٵ�Ŀ�ġ����ΈDֱ�^�����N��ͬ��B(t��i)�µĄ�(d��ng)����rһĿ��Ȼ��ǰ���P(gu��n)ϵ�dz����������SFC�Z(y��)���{(di��o)��߉�P(gu��n)ϵ���ij����(n��i)�ݡ��{(di��o)���O(sh��)Ӌ(j��)����(sh��)�Ȟ鷽�㡣ܛ�������ֱ��C���cӲ�����·�Ľy(t��ng)һ��
���������Ԍ�(du��)��
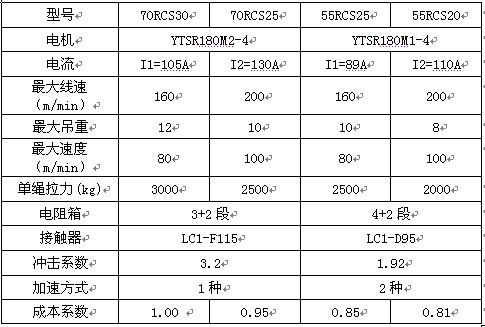
�����x�ò�ͬ��늚ⲿ����늿�ϵ�y(t��ng)�͜p�����M���µ�RCS�����C(j��)��(g��u)�����܅���(sh��)���������ܡ����a(ch��n)�ɱ�����(y��ng)�÷�����������ͬ��Ҋ(ji��n)��3��
������3RCS�����C(j��)��(g��u)���Ԍ�(du��)��
�������Y(ji��)
����һ��(g��)�C(j��)��(g��u)�l(f��)�����Ͽ������O(sh��)Ӌ(j��)�����a(ch��n)��ʹ�á��S�ȶ��ԭ���҂��ļ��g(sh��)������늙C(j��)�x����ʹ�a(ch��n)�����ϵě_��������20%���{(di��o)�������D(zhu��n)�Ӵ������3�θĞ�4�Σ�ʹ�{(di��o)�����Ը���ƽ��(w��n)�����{(di��o)�ٷ�ʽ�Ͽ��Ԝp��늙C(j��)�g���ГQ���������ڿ���ϵ�y(t��ng)���ÿɾ�����������������^�������ȫ���Է�ֹ�`��������˸��M(j��n)��RCS�����C(j��)��(g��u)�Ą�(d��ng)�B(t��i)�^(gu��)�ɕ�(hu��)�ИO��ĸ��ơ�����D(zhu��n)�صĽ��ͷdz���Ч�Ĝp���˙C(j��)е�ě_�����p���X݆���X��늙C(j��)���S�Ĺ����ʡ�ʹ늙C(j��)�Ĺ����_�����Ҳ����½����Ķ����늙C(j��)�ͽ��|����ʹ�É��������ԏV���ؑ�(y��ng)���ڲ�ͬ����ʽ���ؙC(j��)��
�����ۅ����īI(xi��n)��
������1����������\(y��n)ݔ�C(j��)е���ٽY(ji��)��(g��u)�O(sh��)Ӌ(j��)��M�ݣ��������C(j��)е���I(y��)�����磬1997��
������2�����C(j��)е�O(sh��)Ӌ(j��)�փ�(c��)�����W(xu��)���I(y��)������.����.1979
����(bi��o)�}����ʽ���ؙC(j��)RCS�C(j��)��(g��u)�ļ��g(sh��)�����c��(y��ng)��̽ӑ
�D(zhu��n)�dՈ(q��ng)ע����(l��i)�ԣ�http://www.anghan.cn/fblw/ligong/jixie/9816.html
���P(gu��n)��(w��n)�}���
�zӰˇ�g(sh��)�I(l��ng)��AHCI�ڿ����]��Phot...�P(gu��n)ע:106
Nature���¶��W(xu��)���ӿ�Nature Com...�P(gu��n)ע:152
��С�W(xu��)�̎�ֵ���˽⣬�@Щ�����W(xu��)...�P(gu��n)ע:47
2025�ꌑ(xi��)����W(xu��)Փ�Ŀ����õ�19��(g��)...�P(gu��n)ע:192
�y(c��)�L�I(l��ng)��Ƽ������ڿ��x�� �p����...�P(gu��n)ע:64
���r(sh��)�_(k��i)Փ�ęz���C������Ҫ�P(gu��n)ע:52
�Ї�(gu��)ˮ�a(ch��n)�ƌW(xu��)�ڿ��Ǻ����ڿ����P(gu��n)ע:54
��(gu��)�H����(sh��)��Ҫ�˽�Ć�(w��n)�}����P(gu��n)ע:58
��������(sh��)�ܷ��u(p��ng)�Q(ch��ng)���P(gu��n)ע:48
��ŌW(xu��)����Щ��Ͷ���SCI�ڿ���ֵ...�P(gu��n)ע:66
ͨ�Ź����ИI(y��)Փ���x�}�P(gu��n)ע:73
SCIE��ESCI��SSCI��AHCI�ڿ�Ŀ�...�P(gu��n)ע:121
�u(p��ng)�Q(ch��ng)�l(f��)Փ�ĺ�߀�dz���(sh��)���P(gu��n)ע:68
��(f��)ӡ��(b��o)���Y����Ҫ�D(zhu��n)�d��(l��i)Դ�ڿ���...�P(gu��n)ע:51
Ӣ���ڿ����峣Ҋ(ji��n)��Փ�Ġ�B(t��i)����...�P(gu��n)ע:69
Web of Science ���ĺϼ��ڿ��u(p��ng)��...�P(gu��n)ע:59
����Փ�ķ���
�����O(sh��)Ӌ(j��)Փ�� ����Ҏ(gu��)��Փ�� �V�I(y��)Փ�� �C(j��)�һ�w��Փ�� ���bՓ�� ��ͨ�\(y��n)ݔՓ�� ����Փ�� ���Փ�� ˮ��Փ�� �Ԅ�(d��ng)��Փ�� ܇(ch��)�vՓ�� ұ��Փ�� ���I(y��)�O(sh��)Ӌ(j��)Փ�� �C(j��)еՓ��

SCI�ڿ�����
- MEASUREMENT SCIENCE and TECHNOLOGY�п�Ժ�օ^(q��)
- MEAT SCIENCE�ڿ������п�Ժ�օ^(q��)
- MECCANICA�п�Ժ�ׅ^(q��)
- MECHANICAL ENGINEERING�п�Ժ�օ^(q��)
- MECHANICAL SYSTEMS AND SIGNAL PROCESSING�ڿ������п�Ժ�օ^(q��)
- MECHANICS OF MATERIALS�ڿ������п�Ժ�օ^(q��)
- Mechanics of Solids�п�Ժ�օ^(q��)
- MECHANICS OF TIME-DEPENDENT MATERIALS�ڿ������п�Ժ�օ^(q��)
- MECHANISM AND MACHINE THEORY�п�Ժ�ׅ^(q��)
- MECHATRONICS�s־���п�Ժ�ׅ^(q��)